
Super Ball Bot có thể giúp vượt qua phần khó khăn và tốn kém nhất khi thực hiện nhiệm vụ robot đến hành tinh khác: hạ cánh an toàn.
Robot có hình dạng như những quả bóng linh hoạt - được gọi là Siêu bóng - một ngày nào đó có thể lăn và nảy xung quanh để khám phá bề mặt của mặt trăng lớn nhất Sao Thổ, Titan. Nó có một thiết kế mới lạ có thể tiết kiệm chi phí cho phần khó khăn và tốn kém nhất khi thực hiện một nhiệm vụ robot đến một hành tinh khác: hạ cánh an toàn trên bề mặt hành tinh.
Adrian Agogino, điều tra viên chính cho Siêu bóng Bot dự án, mô tả nó như là một:
Sự khởi đầu triệt để từ người máy cứng nhắc truyền thống sự căng thẳng robot.
Viết về dự án tại trang web của NASA Ames, Agogino giải thích rằng robot này, bao gồm một loạt các thanh và dây cáp được kết nối với nhau trong hình dạng của một quả cầu, dựa trên một khái niệm gọi là sự căng thẳng.
Mô hình vẽ bằng máy tính của Super Ball Bot. Hình ảnh qua NASA Ames.
Một thuật ngữ được đặt ra bởi Buckminster Fuller từ Tiếng Đứchàng chụcinte ionlòng biết ơn,” sự căng thẳng được định nghĩa là một cấu trúc ba chiều được làm bằng các thành phần cứng, giống như các ống kim loại, mỗi ống được nối mà không tiếp xúc trực tiếp với một thành phần có lực căng, như dây cáp. Cùng với nhau, hai loại thành phần này duy trì tính toàn vẹn của cấu trúc, có thể là một dạng tự nhiên như hệ thống cơ xương hoặc các công trình nhân tạo như Cầu Kurilpa 1.500 feet ở Queensland, Australia, như trong hình dưới đây.

Cầu Kurilpa bắc qua sông Brisbane ở thành phố Brisbane, Úc. Với chiều dài 1.500 feet, đây là cây cầu căng thẳng lai lớn nhất thế giới. Tín dụng hình ảnh: Paul Guard thông qua Wikimedia Commons.
Tương lai của việc thăm dò hệ mặt trời robot nằm trong các hệ thống linh hoạt dễ đánh giá thấp. Một trọng tải nhỏ gọn sẽ làm giảm chi phí khởi động và vận chuyển. Giai đoạn nguy hiểm nhất của nhiệm vụ, hạ cánh trên bề mặt, cần được thực hiện đơn giản và an toàn. Robot sẽ phải đủ nhanh nhẹn để xử lý địa hình khó khăn nhất.
Super Ball Bots mang theo các dụng cụ khoa học có thể được thu gọn để tạo ra một trọng tải nhỏ gọn nhẹ để phóng và vận chuyển đến một điểm đến trong hệ mặt trời của chúng ta. Chúng có thể được giải nén và triển khai từ quỹ đạo, hướng tới một cuộc đổ bộ nảy lên trên bề mặt hành tinh, nơi sự hấp thụ năng lượng đàn hồi của sự căng thẳng cấu trúc sẽ bảo vệ các gói dụng cụ đặt ở trung tâm khỏi lực tác động. Để di chuyển trên bề mặt, bot sẽ sử dụng các động cơ truyền động trong các bộ phận căng thẳng của nó để tự biến dạng thành lăn trên địa hình.
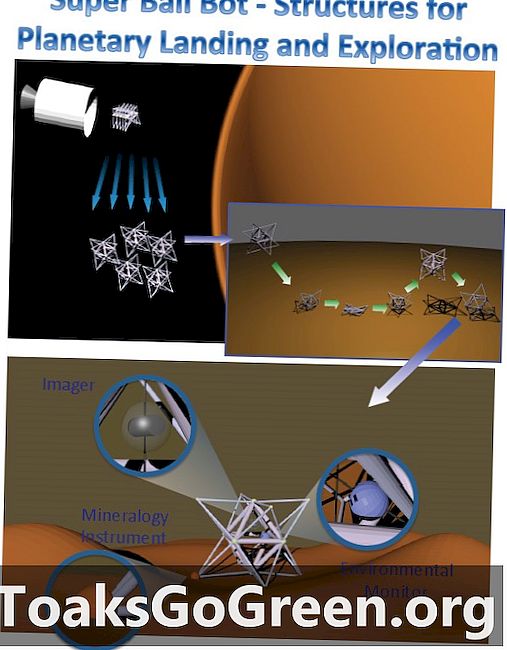
Hình trên cho thấy cách Super Ball Bots có thể được triển khai từ quỹ đạo đến độ nảy trên mặt đất trên hành tinh. Trong hình ảnh thấp hơn, một bản vẽ khái niệm cho thấy trọng tải công cụ trung tâm. Tín dụng hình ảnh: NASA Ames.
Tuy nhiên, lái xe một sự căng thẳng cấu trúc khó hơn rất nhiều so với trong video. Super Ball Bot sẽ phải được lập trình để vượt qua các loại cảnh quan khác nhau và đối phó với các chướng ngại vật, có lẽ tự dạy mình để cải thiện các kỹ năng đi bộ trên đường của mình để thích nghi với các địa hình cụ thể. Agogino và nhóm của ông hiện đang làm việc với các bot bóng nguyên mẫu nhỏ có đường kính khoảng ba feet (một mét), nhưng các bot có thể được thu nhỏ để tùy chỉnh nó cho các nhiệm vụ khoa học khác nhau.

Hình ảnh được vẽ bằng máy tính của Super Ball Bots lăn quanh bề mặt hành tinh. Hình ảnh qua NASA Ames.
Điểm mấu chốt: Các nhà khoa học đang thiết kế một loại robot mới sáng tạo có thể một ngày nào đó khám phá mặt trăng lớn nhất của Sao Thổ, Titan. Gọi nó là, đặt tên nó là Siêu bóng Bot, quả cầu linh hoạt này với gói dụng cụ trung tâm đang được thiết kế để bật lên hạ cánh trên bề mặt, sau đó lăn để khám phá địa hình bằng cách tự biến dạng. Khái niệm thiết kế này được gọi là sự căng thẳng, tên của các cấu trúc có các bộ phận cứng được nối mà không tiếp xúc trực tiếp với các bộ phận chịu lực, chẳng hạn như thanh kim loại được nối với cáp linh hoạt.